Mengenal Titik Koordinat dan GPS – dalam tulisan kali ini saya akan mengenalkan kepada kawan - kawan tentang titik koordinat dan GPS, mengapa pembahasannya di gabung karena kedua tidak bisa di pisahkan, mereka saling melengkapi satu sama lain 😀, ayo yang jomblo masa kalah sama titik koordinat dan GPS hahahah 😄😄😄, oke langsung saja kita baca tulisannya di bawah ini 👇👇
A. Metode Penentuan Posisi
Metoda penentuan
posisi adalah cara
untuk mendapatkan informasi
koordinat suatu objek
(contoh koordinat titik batas, koordinat batas persil tanah dan
lain-lain) di lapangan. Metoda penentuan posisi dapat dibedakan dalam dua
bagian, yaitu metoda penentuan posisi terestris dan metoda penentuan posisi
extra- terestris (satelit).
Pada metoda
terestris penentuan posisi
titik dilakukan dengan
melakukan pengamatan terhadap
target atau objek
yang terletak di
permukaan bumi. Beberapa
contoh metoda yang
umum digunakan adalah:
Perbandingan
dari daerah yang sama untuk proyeksi yang berbeda
a. Metode poligon.
b. Metode pengikatan ke muka.
c. Metode pengikatan ke belakang dan lain-lain.
Pada
metode ekstra terestris penentuan posisi dilakukan berdasarkan pengamatan
terhadap benda atau objek di angkasa seperti bintang, bulan, quasar dan satelit
buatan manusia, beberapa contoh penentuan posisi extra terestris adalah sebagai
berikut:
a. Astronomi geodesi.
b. Transit Dopler.
c. Global Positioning System (GPS) dan
lain-lain.
B. Titik Koordinat
Posisi
suatu titik biasanya dinyatakan dengan koordinat (dua-dimensi atau
tiga-dimensi) yang mengacu pada
suatu sistem koordinat
tertentu. Sistem koordinat
itu sendiri dapat
didefinisikan dengan menspesfikasi tiga parameter berikut, yaitu:
a. Lokasi
Titik Nol dari Sistem Koordinat
Posisi
suatu titik di permukaan bumi umumnya ditetapkan dalam/terhadap suatu sistem
koordinat terestris. Titik nol dari sistem koordinat terestris ini dapat
berlokasi di titik pusat massa bumi (sistem
koordinat geosentrik), maupun di salah satu titik di permukaan bumi
(sistem koordinat toposentrik).
b. Orientasi
dari Sumbu-sumbu Koordinat
Posisi tiga-dimensi (3D) suatu titik di
permukaan bumi umumnya dinyatakan dalam suatu sistem koordinat geosentrik. Tergantung
dari parameter-parameter
pendefinisi koordinat yang
digunakan, dikenal dua sistem
koordinat yang umum digunakan, yaitu sistem koordinat Kartesian (X,Y,Z) dan
sistem koordinat Geodetik (L,B,h),
yang keduanya diilustrasikan
pada gambar berikut:
Gambar 1 sistem koordinat sistem koordinat Kartesian dan koordinat Geodetik
Koordinat
3D suatu titik juga bisa dinyatakan dalam suatu sistem koordinat toposentrik,
yaitu umumnya dalam bentuk sistem koordinat Kartesian (N,E,U) yang
diilustrasikan pada gambar berikut.

Gambar 2 Sistem koordinat 3D sistem koordinat
Kartesian
Parameter - parameter (kartesian, curvilinear) yang digunakan untuk mendefiniskan posisi suatu titik dalam sistem koordinat tersebut. Posisi titik juga dapat dinyatakan dalam 2D, baik dalam (L,B), ataupun dalam suatu sistem proyeksi tertentu (x,y) seperti Polyeder, Traverse Mercator (TM) dan Universal Traverse Mercator (UTM).
C. Global Positioning System (GPS)
GPS
adalah sistem navigasi
dan penentuan posisi
menggunakan satelit yang
dikembangkan dan dikelola oleh
Departemen Pertahanan Amerika
Serikat. GPS dapat
memberikan informasi tentang posisi, kecepatan dan waktu di mana
saja di muka bumi setiap saat, dengan ketelitian penentuan posisi dalam fraksi
milimeter sampai dengan meter. Nama formalnya adalah NAVSTAR GPS (Navigation
Satellite Timing and Ranging Global Positioning System). GPS didesain untuk
memberikan informasi posisi, kecepatan dan waktu. Pada dasarnya GPS terdiri
atas 3 segmen utama, yaitu:
1.
Segmen ngkasa (space segment)
Terdiri
dari 24 satelit yang terbagi dalam 6 orbit dengan inklinasi 55° dan ketinggian ± 20.200 Km dari permukaan bumi dan periode orbit 11 jam 58 menit.

Gambar 3 Konstelasi
Satelit di
Luar Angkasa
Setiap
satelit GPS secara kontinyu memancarkan sinyal-sinyal gelombang pada 2
frekuensi L-band (dinamakan L1 dan L2). Dengan mengamati sinyal-sinyal dari
satelit dalam jumlah dan waktu yang cukup, kemudian data yang diterima tersebut dapat dihitung
untuk mendapatkan informasi posisi,
kecepatan maupun waktu.
2.
Segmen sistem Kontrol (control system
segment)
Adalah stasiun-stasiun pemonitor dan pengontrol
satelit yang berfungsi untuk memonitor dan mengontrol kelaikgunaan
satelit-satelit GPS. Stasiun kontrol ini tersebar di seluruh dunia, yaitu di
pulau Ascension, Diego Garcia, Kwajalein, Hawai dan Colorado Springs. Di
samping memonitor dan mengontrol
fungsi seluruh satelit, juga
berfungsi menentukan orbit dari
seluruh satelit GPS. Mempunyai tanggung jawab untuk memantau satelit GPS supaya
satelit GPS dapat tetap berfungsi dengan tepat. Misalnya untuk sinkronisasi
waktu, prediksi orbit dan monitoring “kesehatan” satelit.

Gambar 4 orbit Satelite GPS
Segmen
pemakai merupakan pengguna, baik di darat, laut maupun udara, yang menggunakan
receiver GPS untuk mendapatkan sinyal GPS sehingga dapat menghitung posisi,
kecepatan, waktu dan parameter lainnya. peralatan (Receiver GPS) yang dipakai
pengguna satelit GPS, baik di darat, laut, udara maupun di angkasa. Alat
penerima sinyal GPS (Receiver GPS) diperlukan untuk menerima dan memproses
sinyal-sinyal dari satelit GPS untuk digunakan dalam penentuan posisi, kecepatan,
maupun waktu. Secara
umum Receiver GPS dapat
diklasifikasikan sebagai berikut :
· Receiver militer
· Receiver tipe navigasi
· Receiver tipe geodetic
D. Prinsip dan Metode Penentuan Posisi Dengan GPS

Gambar 5 Space Segment
Pengukuran
jarak secara simultan ke beberapa satelit yang telah diketahui koordinatnya
(metode reseksi dengan jarak).
Pada
pengamatan posisi suatu titik dengan gps pada suatu epok, ada 4 parameter yang
harus ditentukan yaitu :
· 3 parameter koordinat ( X, Y, Z atau
L, B, h )
· 1 parameter kesalahan waktu (ketidak
sinkronan antara jam (osilator) di satelit dengan jam di reciever gps).
Untuk
itu diperlukan minimal pengamatan jarak ke 4 (empat) satelit.
Prinsip pengukuran jarak : Receiver GPS
membandingkan kode yang diterima dari satelit dengan replika kode yang
diformulasikan di dalam receiver. Waktu yang diperlukan untuk ‘mengimpitkan’
kedua kode tersebut adalah waktu yang diperlukan oleh kode tersebut untuk
menempuh jarak dari satelit ke pengamat.

Jarak = Kecepatan Cahaya x dt
Karena jam receiver tidak sinkron dengan jam satelit maka jarak di atas masih terkontaminasi oleh kesalahan waktu, sehingga jarak tersebut dinamakan pseudorange. Presisi jarak sekitar 1% dari code width (panjang gelombang kode).Untuk kode-P = 0.3 m dan untuk kode-C/A = 3m.

Jara fase
Jarak
ukuran dari pengamatan ke satelit pada epok t, dihitung berdasarkan rumus :
Jarak = panjang gelombang. (teta + N ).
Untuk
merubah data fase menjadi data jarak, cycle ambiguity N harus ditentukan
terlebih dahulu nilainya.
Kalau
nilai bilangan bulat N bisa ditentukan secara benar :
· jarak fase akan menjadi ukuran jarak
yang sangat teliti (orde mm).
· dapat digunakan untuk penentuan
posisi secara teliti (orde mm – cm).
Pada dasarnya
konsep dasar penentuan
posisi dengan satelit
GPS adalah pengikatan
ke belakang dengan jarak, yaitu mengukur jarak ke beberapa satelit GPS
yang koordinatnya telah diketahui. Perhatikan gambar berikut :
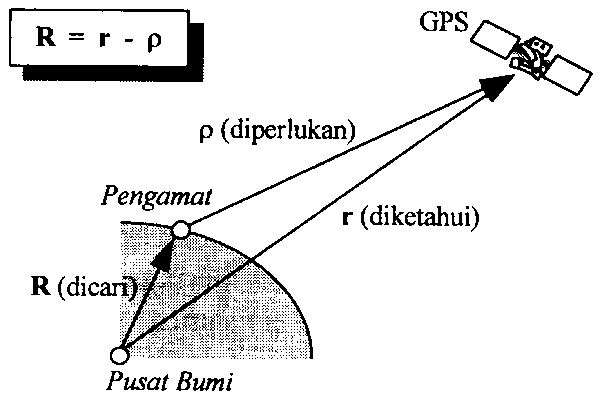
Gambar 6 Metode Penentuan Posisi GPS
· Metoda absolut,
· Metoda relatif (differensial).
· Metode RTK (Real Time Kinematic)
1) Metoda Absolut
Penentuan
posisi dengan GPS metode absolut adalah penentuan posisi yang hanya menggunakan
1 alat receiver GPS. Karakteristik penentuan posisi dengan cara absolut ini
adalah sebagai berikut :
· Posisi ditentukan dalam sistem W GS
84 (terhadap pusat bumi).
· Prinsip penentuan
posisi adalah perpotongan
ke belakang dengan
jarak ke beberapa satelit
sekaligus.
· Hanya memerlukan satu receiver GPS.
· Titik yang ditentukan posisinya bisa
diam (statik) atau bergerak (kinematik).
· Ketelitian posisi berkisar antara 5
sampai dengan 10 meter.
Aplikasi utama
untuk keperluan navigasi,
metoda penentuan posisi
absolut ini umumnya
menggunakan data pseudorange
dan metoda ini
tidak dimaksudkan untuk aplikasi-aplikasi yang menuntut
ketelitian posisi yang tinggi.

Gambar 7 Metode Absolute
2) Metoda Relatif (Differensial)
Yang
dimaksud dengan penentuan posisi relatif atau metoda differensial adalah
menentukan posisi suatu titik relatif terhadap titik lain yang telah diketahui
koordinatnya, pengukuran dilakukan secara bersamaan pada dua titik
dalam selang waktu tertentu. Selanjutnya dari data hasil
pengamatan diproses/dihitung akan didapat perbedaan koordinat kartesian 3 dimensi
(dx, dy, dz) atau disebut juga dengan baseline antar titik yang diukur.
Karakteristik
umum dari metoda penentuan posisi ini adalah sebagai berikut :
· Memerlukan minimal
2 receiver, satu
ditempatkan pada titik
yang telah diketahui koordinatnya.
· Posisi titik ditentukan relatif
terhadap titik yang diketahui.
· Konsep dasar adalah differencing process
dapat mengeliminir atau mereduksi pengaruh dari beberapa kesalahan dan bias.
· Bisa menggunakan data pseudorange
atau fase.
· Ketelitian posisi yang diperoleh
bervariasi dari tingkat mm sampai dengan dm.
· Aplikasi utama : survei pemetaan,
survei penegasan batas, survei geodesi dan navigasi dengan ketelitian tinggi.

Gambar 8 Metode Relatif
3)
Merode Real Time Kinematic (RTK)
· Sistem RTK (Real Time Kinematic)
umum digunakan untuk sistem penentuan posisi real time secara diferensial
menggunakan data fase.
· umumnya digunakan untuk menentukan
posisi objek yang bergerak maupun diam.
· Agar real time, maka monitor station
harus mengirimkan data fase ke pengguna secara real time menggunakan sistem
komunikasi tertentu.
· Koreksi diferensial : Koreksi pseudorange (RTCM SC-104) dan Koreksi
koordinat
· Ketelitian tipikal posisi 1 – 5 cm
· Aplikasi utama : Staking out, survey
kadaster, servey pertambangan, navigasi berketelitian tinggi.

Gambar 8 Metode RTK
E. Aplikasi-Aplikasi
GPS
Beberapa
aplikasi dari GPS diantaranya adalah sebagai berikut :
1. Survei dan pemetaan.
2. Survei penegasan batas wilayah
administrasi, pertambangan dan lain-lain.
3. Geodesi, Geodinamika dan Deformasi.
4. Navigasi dan transportasi.
5. Telekomunikasi.
6. Studi troposfir dan ionosfir.
7. Pendaftaran tanah, Pertanian.
8. Photogrametri & Remote Sensing.
9. GIS (Geographic Information System).
10.Studi kelautan (arus, gelombang,
pasang surut).
11.Aplikasi olahraga dan rekreasi.
Sumber Tulisan :
https://mupego.wordpress.com/2015/08/20/prinsip-dan-metoda-penentuan-posisi-dengan-gps/
http://geograph88.blogspot.co.id/2015/09/metode-penentuan-posisi-gps.html
https://belajargeomatika.wordpress.com/2011/12/23/penentuan-posisi-dengan-gps/
Jangan Lupa Baca Juga Tulisan Sebelumnya :






